Tactile sensing is always admired by the robotics systems while the dexterous movement by grippers is more significant at this stage. In this project, we develop a novel optical-based tactile sensor with design, fabrication, characterization and testing experiments. An effective signal processing algorithms is developed for output.
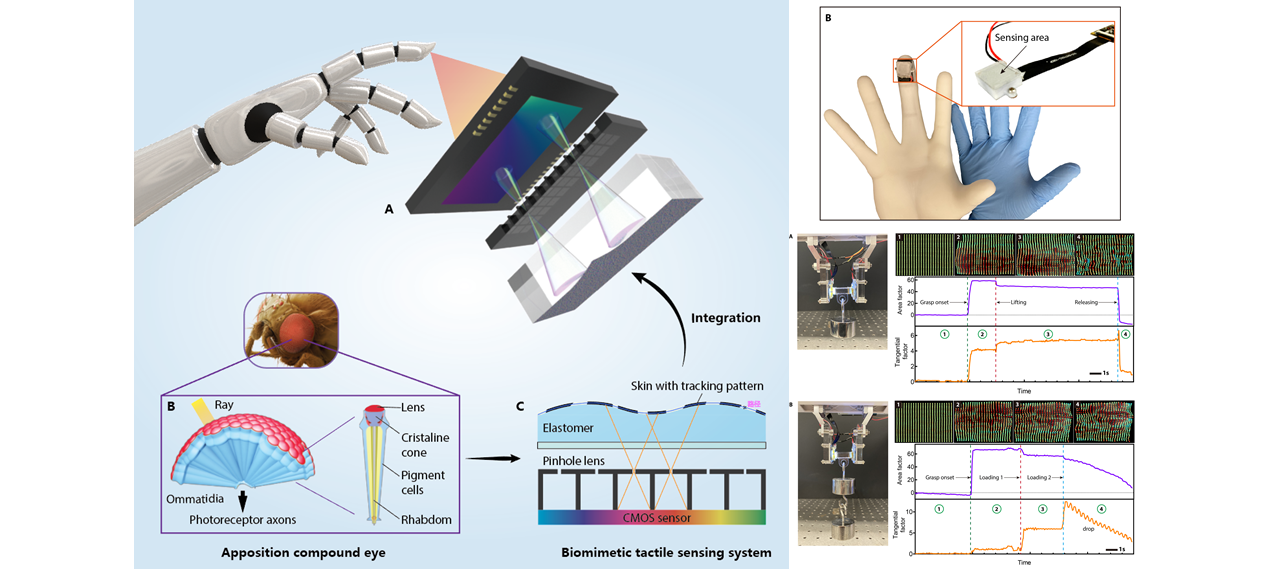
The sensor is composed with three sub-systems, a skin layer with embedded marker to touch with stimuli, an imaging sub-system for multiple vision imaging, and a supporting sub-system which includes the frame, illumination source.
While being excited with contact force, the camera tracks the movements of markers and deformation field is obtained. Compared to existing tactile sensors, our sensor features minimized size and high resolution.